Основные причины неисправности

Устройство системы управления автомобиля, как и все его механизмы, подвержены поломкам.
Рекомендуем: Устройство гидромеханической автоматической коробки передач
В большинстве случаев их можно предугадать заранее, по причине наличия предшествующих симптомов.
Системе могут нанести ущерб, события неблагоприятного характера , такие как:
- неправильная эксплуатация транспортного средства, выраженная в агрессивном стиле езды;
- некачественное покрытие дороги, наличие выбоин и неровностей;
- установка запчастей неоригинального производства при проведении процедуры их замены;
- некомпетентное проведение ремонтных работ ;
- несвоевременное обслуживание;
- превышение срока эксплуатации оборудования.

Возникшие неполадки с системой управления авто в процессе движения транспорта, могут стать причиной аварий. Поэтому следует прислушиваться к признакам, которые относятся к предвестникам неприятностей.
Особенности правостороннего и левостороннего руля

На сегодняшний день в части стран мира правостороннее движение, а в части – левостороннее. Рулевое колесо при этом располагается либо слева, либо справа. Это означает, что элементы конструкции, передающие с него усилия на колеса также расположены либо слева, либо справа.
Однако это не означает, что руль невозможно перенести на другое место. Такую процедуру выполняют во многих автосервисах. Впрочем, нужно понимать, что она достаточно сложна, так как требует:
- поиска или изготовления на заказ соответствующих деталей;
- приобретения новой приборной панели;
- перенесения всех приборов на другую сторону.
Все это делает смену положения руля дорогим удовольствием, поэтому многие водители, которые приобрели авто в стране с другим типом движения, оставляют его на прежнем месте.
Гораздо проще в этом плане дело обстоит с колесной дизельной техникой. Многие трактора, грейдеры, уборочные машины имеют гидрообъемное рулевое управление. При использовании подобной конструкции положение руля не имеет значения, поэтому его можно установить как справа, так и слева. Некоторые модели самоходных машин даже имеют гнезда для установки рулевого колеса с обеих сторон приборной панели.
Однако на легковых автомобилях гидрообъемное управление не устанавливают. Его изредка можно встретить на вездеходах и внедорожниках.
Мнение автолюбителей насчет комплексной диагностики рулевого управления
- Временами необходимо
«Такие вопросы откровенно удивляют. Если нет ощущения неправильной работы, то и в диагностике нет нужды. Если же чувствуется, что есть проблемы, нужно обращаться в сервис. А там перед ремонтом обязательно займутся диагностикой рулевого управления. Если будет нужно, то и комплексную сделают. В некоторых ситуациях это единственный вариант».
- Тщательно выбирать СТО
«Отдавать машину на комплексную диагностику системы рулевого управления нужно исключительно в проверенную СТО. Или же в такой сервис, который порекомендовали хорошие друзья. В одной фирме мне сообщили о необходимости замены рулевой рейки. Но я решил подумать и за это время обратился к другому специалисту. С его помощью выяснилось, что неисправен только датчик».
- Необходимо понимать устройство автомобилей
«Для меня это впустую выброшенные деньги. С большой долей вероятности водитель почувствует, что с рулевой что-то не так. Нужно лишь иметь знания об устройстве машин. Если руки растут откуда надо, самостоятельный ремонт будет несложным. Можно также прибегнуть к помощи компетентного помощника».
- Незачем заморачиваться
«Наши реалии таковы, что очень мало осталось спецов, способных по работе машины найти и локализовать неполадки. А вот СТО оснащены кучей стендов для диагностики рулевого управления. В хорошем сервисе ремонт проведут добротно и оперативно. Поэтому незачем обращаться к доморощенным мастерам».
-
- В некоторых случаях без полной диагностики не обойтись
«Почему полная диагностика только рулевой системы? Иногда нужно обследовать весь автомобиль. Весьма актуально при покупке подержанной машины. В противном случае можно нарваться на кота в мешке. А кот, в отличие от авто, для езды не предназначен».



Требования к системе рулевого управления
Система рулевого управления преобразует создаваемые водителем вращательные движения рулевого колеса в изменение угла поворота управляемых колес автомобиля. Конструкция и схема системы призваны обеспечить удобное и безопасное рулевое управление автомобиля во всех ситуациях и на всех скоростях. Вся система рулевого управления, от рулевого колеса и до управляемых колес, должна в этих целях обладать следующими свойствами.
Передача инициируемых водителем рулящих движений на рулевом колесе без люфта особенно важна при движении по прямой. Это гарантирует безопасное, неутомительное для водителя управление автомобилем, прежде всего на средних и высоких скоростях.
Поэтому рулевой механизм должен быть очень жестким. Это необходимо для обеспечения точной управляемости и преодоления отклонения от заданного угла поворота рулевого колеса под действием изменяющихся возвратных сил, возникающих, например, при изменении бокового ускорения.
Слабое трение в рулевом механизме позволяет водителю получать через реактивные силы тактильную обратную связь, дающую информацию о коэффициенте сцепления между дорогой и шинами. Слабое трение также помогает колесам выровняться для движения по прямой. В системах рулевого управления с мускульной энергией слабое трение обеспечивает небольшие движущие силы. В системах рулевого управления с усилителем оно повышает эффективность управления.
Кинематические параметры рулевого управления и конструкция управляемой оси автомобиля должны быть такими, чтобы водитель мог чувствовать величину сцепления между шинами и дорогой.
Требования к рулевому управлению
Требованиями к функционированию системы рулевого управления являются:
Легкое, безопасное рулевое управление автомобилем. Сюда, к примеру, относится тенденция рулевого управления автоматически возвращаться в положение прямолинейного движения при отпускании руля.
Максимально возможное демпфирование колебаний, передаваемых от колес автомобиля на рулевое колесо при движении по неровным дорогам. Но этот процесс не должен приводить к потере обратной связи в рулевом управлении.
Для обеспечения чистого качения колес и, соответственно, предотвращения их избыточного износа вся рулевая кинематика должна удовлетворять условию Аккермана. Это означает, что оси управляемых колес должны пересекаться в одной точке с осью задних колес (рис. «Условие Аккермана» ).
Достаточно жесткая схема всех компонентов рулевого механизма означает, что даже малые инициируемые водителем рулевые движения преобразуются в изменение направления управляемых колес, обеспечивая безопасную и точную управляемость автомобиля.
Угол поворота рулевого колеса от упора до упора по соображениям комфорта должен быть как можно меньше при парковке и движении с небольшой скоростью. Однако на средних и высоких скоростях рулевое управление не должно быть столь чувствительным.
Требования законодательства, предъявляемые к системам рулевого управления автомобилей
Требования законодательства, предъявляемые к системам рулевого управления автомобилей, описаны в международных правилах ECE-R79. К этим требованиям, наряду с базовыми функциональными требованиями, относятся максимально допустимые управляющие силы для исправной и неисправной систем рулевого управления. Эти требования регламентируют прежде всего поведение автомобиля и рулевого управления при въезде на круг и выезде с круга. Для автомобилей всех категорий: после отпускания рулевого колеса при движении автомобиля по окружности на скорости 10 км/ч, радиус поворота автомобиля должен увеличиться или как минимум остаться тем же.
Для автомобилей категории М1 (легковые автомобили с числом посадочных мест до 8): когда автомобиль в тангенциальном направлении выезжает из круга с радиусом 50 м на скорости 50 км/ч, в системе рулевого управления не должно возникать никаких необычных вибраций. В автомобилях категорий М2, М3, N1, N2 и N3 это поведение должно демонстрироваться на скорости 40 км/ч или, если это значение не достигается, то на максимальной скорости.
Это поведение также предписывается в случае неисправности у автомобилей с гидро- или электроусилителем рулевого управления. У автомобилей категории М1 это должно быть возможно в случае отказа сервопривода рулевого управления для въезда со скоростью 10 км/ч в течение 4 секунд в круг радиусом 20 м. Управляющее усилие на рулевом колесе не должно превышать 30 даН (табл. «Нормы рабочих усилий в системе рулевого управления» ).
Устройство и принцип работы системы AFS
. Конструкция достаточно простая и отличается неплохим КПД передачи крутящего момента руля (устанавливают на авто с независимой подвеской). Основой служит рулевая рейки с шестерней, сама же шестерня устанавливается на вал и постоянно находится в сцеплении с рейкой.
Вращая руль, рейка за счет шестеренки перемещается в горизонтальном положении влево или вправо. Тяги, прикрепленные к рейке, так же перемещаются в соответствии с поворотом руля, тем самым передавая усилия на колеса и поворачивая их по сторонам. Основные плюсы в самом строении, меньше тяг и шарниров, компактность, невысокая цена обслуживания, простота конструкции и надежность. Есть и минусы, редуктор такого механизма весьма чувствительный к неровностям на дороге, за чет чего любой удар колеса передается на руль.
Второй вид механизма –
. Считается самым старым видом среди существующих вариантов. Чаще всего встречается на классических, отечественных автомобилях, а так же на машинах с повышенной проходимостью. Как правило, подвеска таких автомобилей зависимая. От предыдущего вида червячный механизм отличается наличием червячного ролика, вместо шестерни, картера, а так же рулевой сошки.
Последний из видов рулевого управления –
. В отличие от двух предыдущих видов, механизм соединяется с помощью гайки и шариков специального винта. Как показывает практика, износ такого механизма минимальный, а детали ломаются очень редко.
Чаще всего винтовой механизм применяют на грузовых автомобилях, автобусах и легковых автомобилях представительского класса с повышенным комфортом и безопасностью. По принципу работы винтовой подвид работает так же, как и червячный, передавая момент прокручивания руля через червячную передачу.
Соответственно с зашитой логикой и программой блоки управления создают управление исполнительными механизмами как сервопривод рулевого механизма, сервопривод колес и электромагнитное сцепление возле руля. Рассмотрим механизмы и их назначение по отдельности. Благодаря сервоприводу рулевого механизма колеса повернутся на определенный угол, как правило, на каждое колесо инженеры установили свой сервопривод.
Для симуляции реальности поворота руля с усилием используется сервопривод руля, создается ощущения скольжения колес по дороге. Одним из важных элементов безопасности является электромагнитное сцепление. Во время подачи электроэнергии сцепление будет в разомкнутом состоянии, а рулевое управление будет проходить по проводам.
Принцип работы не такой то и сложный, когда водитель начинает вращать руль, датчик поворота руля считывает угол изменения положения и передает информацию на блоки управления. Далее идут расчеты, насколько нужно повернуть передние колеса. Таким образом, сервопривод перемещает рулевую рейку и обеспечивает поворот колес в соответствии с рассчитанным углом.
В это же время, рассчитав угол поворота, блок управления посылает обратно на сервопривод руля сигнал и имитирует усилие поворота колес. Как видим принцип работы механизма не сложный, но все же требует большой точности механизмов и их согласованности. Кроме этого стоит следить за исправностью всего механизма.
Самая главная функций эпициклической шестерни — изменение передаточного отношение, которое может достигать 1:10 при максимальной скорости вращения в определенном направлении. При этом руль становится острым, а углы поворота влево и вправо до упора уменьшаются, благодаря чему достигается больший комфорт в управлении.
При росте скорости движения, электродвигатель вращается медленней и передаточное отношение рулевого механизма уменьшается. В конечном итоге, электродвигатель прекращает свое вращение, это происходит на скорости в 180-200 км/ч, а усилие от рулевого колеса передает напрямую на рулевой механизм.
Если вдруг при повороте, будет зафиксирована избыточная поворачеваемость (потеря сцепления задних колес с поверхностью), то система динамической стабилизации DSC автоматически корректирует углы повороты передних колес. Также система стабилизирует движения автомобиля на скользкой дороге или при торможении.
Дальнейшее включение электромотора осуществляется с набором скорости, при этом его ротор вращается в обратную сторону. Величина передаточного числа равняется 1:20, многократно снижается острота руля и возрастает величина его оборотов, что позволяет в разы увеличить управляемость транспортным средством во время езды при высоком скоростном режиме.

Напоследок отметим, что система AFS постоянно находится в рабочем состоянии. Отключить ее невозможно.
Принцип работы
Каждое ведущее колесо базируется на поворотном кулаке, который соединен с передней осью с помощью так называемого шкворня. Когда водитель крутит руль, усилие от этого при участии рычагов и тяг передается на поворотные кулаки. Они оборачиваются под требуемым углом и таким образом влияют на направление движения.
Для исключения риска бокового скольжения колес в процессе поворота важно, чтобы у описываемых ими окружностей был общий центр, где пересекаются продолжения осей всех приборов транспортного средства. Его называют центром поворота
По этой причине ведущие колеса поворачиваются на разные углы: внешние – на меньший, внутренние – на больший.
Поворачивая руль, водитель поворачивает колеса, то есть посредством рулевого механизма он передает усилие на тяги и рычаги рулевого привода, которые оказывают прямое воздействие на угол поворота ведущих колес. Учитывая тот факт, что рулевой механизм представляет собой устройство, которое повышает крутящий момент и при этом снижает обороты, он, помимо всего прочего, в разы увеличивает усилие воздействия.
Фактически значение рулевого управления сводится к выполнению им следующих функций:
- Увеличение приложенного к рулю усилия.
- Передача этого усилия на рулевой привод.
- Самостоятельный возврат руля в исходное положение после снятия нагрузки.
По сути, рулевой механизм представляет собой механическую передачу, основным параметром которой следует считать передаточное число.
Основные типы приводов и рулевых механизмов
Рулевой механизм.
предназначен для поворота управляемых колес с небольшим усилием на рулевом колесе. Что достигается за счет увеличения передаточного числа рулевого механизма. Однако передаточное число ограничивается количеством оборотов рулевого колеса. Если выбрать передаточное число с количеством оборотов рулевого колеса больше 2-3, то существенно увеличивается время поворотаавтомобиля, что является недопустимым в условиях движения. В следствии этого производят огрничение передаточного числа в рулевых механизмах в пределах 20-30, а для уменьшения усилия на рулевом колесе в рулевой механизм или привод встраивают усилитель.
Ограничение передаточного числа рулевого механизма также связано со свойством обратимости (способностью передавать обратное вращение через механизм на рулевое колесо). При больших передаточных числах увеличивается трение в зацеплениях механизма, свойство обратимости пропадает и самовозврат управляемых колес после поворота в прямолинейное положение оказывается невозможным.
Рулевые механизмы в зависимости от типа рулевой передачи разделяют на:
- • червячные,
- • винтовые,
• шестеренчатые.
Рулевой механизм с передачей типа червяк — ролик имеет в качестве ведущего звена червяк, который закреплен на рулевом валу, а ролик установлен на роликовом подшипнике на одном валу с сошкой. Для полного зацепление при большом угле поворота червяка, нарезку червяка выполняют по дуге окружности — глобоиде. Такой червяк называют глобоидным.
В винтовом механизме вращение винта, связанного с рулевым валом, передается гайке, заканчивающейся рейкой, зацепленной с зубчатым сектором, а сектор установлен на одном валу с сошкой. Данный рулевой механизм образован рулевой передачей типа винт-гайка-сектор.
В шестеренчатых рулевых механизмах рулевая передача образуется цилиндрическими или коническими шестернями, к ним же относят передачу типа шестерня-рейка. В последних цилиндрическая шестерня связана с рулевым валом, а рейка, зацепленная с зубьями шестерни, выполняет роль поперечной тяги. Реечные передачи и передачи типа червяк-ролик преимущественно применяют на легковых автомобилях, так как обеспечивают сравнительно небольшое передаточное число.

Рулевой привод.
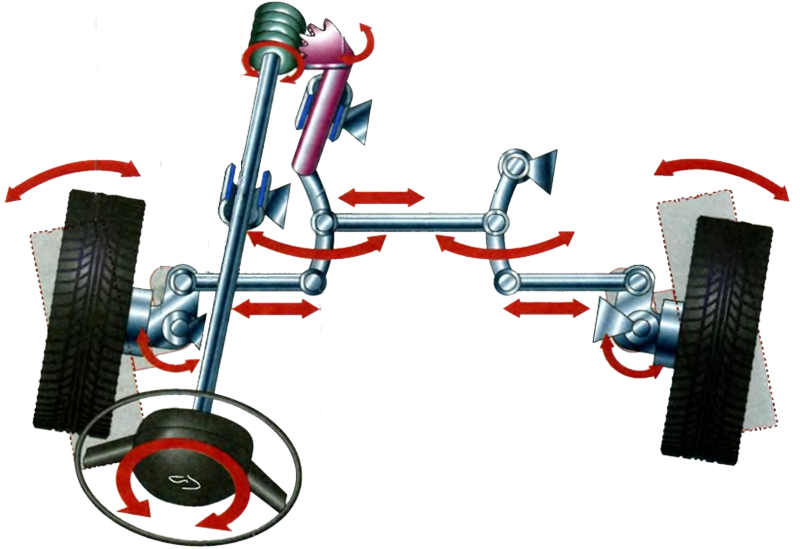
Конструкции рулевого привода различают по расположению рычагов и тяг, составляющих рулевую трапецию, по отношению к передней оси. Если рулевая трапеция находится впереди передней оси, то конструкция рулевого привода называется передней рулевой трапецией, при заднем расположении — задней трапецией. Большое влияние на конструктивное исполнение и схему рулевой трапеции оказывает конструкция подвески передних колес.
При зависимой подвеске рулевой привод имеет более простую конструкцию, так как состоит из минимума деталей. Поперечная рулевая тяга в этом случае сделана цельной, а сошка качается в плоскости, параллельной продольной оси автомобиля. Можно сделать привод и с сошкой, качающейся в плоскости, параллельной переднему мосту. В следствии этого продольная тяга будет отсутствовать, а усилие от сошки передается прямо на две поперечные тяги, связанные с цапфами колес.
При независимой подвеске передних колес схема рулевого привода конструктивно сложнее. В данном случае появляются дополнительные детали привода, которых нет в схеме с зависимой подвеской колес. Изменяется конструкция поперечной рулевой тяги. Она сделана расчлененной, состоящей из трех частей: основной поперечной тяги 4 и двух боковых тяг — левой и правой. Для опоры основной тяги служит маятниковый рычаг, который по форме и размерам соответствует сошке . Соединение боковых поперечных тяг с поворотными рычагами цапф и с основной поперечной тягой выполнено с помощью шарниров, которые допускают независимые перемещения колес в вертикальной плоскости. Рассмотренная схема рулевого привода применяется главным образом на легковых автомобилях.
Рулевой привод, являясь частью рулевого управления автомобиля, обеспечивает не только возможность поворота управляемых колес, но и допускает колебания колес при наезде ими на неровности дороги. При этом детали привода получают относительные перемещения в вертикальной и горизонтальной плоскостях и на повороте передают усилия, поворачивающие колеса. Соединение деталей при любой схеме привода производят с помощью шарниров шаровых либо цилиндрических.
Виды рулевого управления
В зависимости от типа редуктора системы, рулевой механизм (система рулевого управления) может быть следующих видов:
- Реечный — самый распространенный вид, используемый в легковых автомобилях. Этот вид рулевого механизма имеет простую конструкцию и отличается высоким КПД. Недостатки заключаются в том, что этот тип механизма чувствителен к возникающим ударным нагрузкам при эксплуатации в сложных дорожных условиях.
- Червячный — обеспечивает хорошую маневренность автомобиля и достаточно большой угол поворота колес. Этот вид механизма меньше подвержен влиянию ударной нагрузки, но более дорогостоящий в изготовлении.
- Винтовой — принцип работы похож на червячный механизм, однако он имеет более высокий КПД и позволяет создавать большие усилия.
- С гидравлическим усилителем (ГУР). Его основным достоинством является компактность и простота конструкции. Гидравлическое рулевое управление среди современных транспортных средств является одним из наиболее распространенных. Недостатком такой системы является необходимость контроля уровня рабочей жидкости.
- С электрическим усилителем (ЭУР). Такая система рулевого управления с усилителем считается наиболее прогрессивной. Он обеспечивает простоту регулировки настроек управления, высокую надежность работы, экономный расход топлива и возможность управления автомобилем без участия водителя.
- С электрогидравлическим усилителем (ЭГУР). Принцип действия данной системы аналогичен системе с гидравлическим усилителем. Главное отличие заключается в том, что насос усилителя приводится в действие электродвигателем, а не ДВС.
Рулевое управление современного автомобиля может быть дополнено следующими системами:
- Активного рулевого управления (AFS) — система изменяет величину передаточного отношения в зависимости от текущей скорости. Она позволяет корректировать угол поворота колес и обеспечивает более безопасное и устойчивое движение на скользких поверхностях.
- Динамического рулевого управления — работает аналогично активной системе, однако в конструкции в этом случае вместо планетарного редуктора используется электродвигатель.
- Адаптивного рулевого управления для транспортных средств — главной особенностью является отсутствие жесткой связи между рулем автомобиля и его колесами.
Рулевой механизм Active Steering с переменным передаточным отношением
Можно ли изменять передаточное отношение усилия на руле? Этот вопрос особенно актуален при движении автомобиля на высокой скорости, когда не требуется лишняя острота рулевого управления. Ведь небольшие изменения положения руля могут повлиять на движение автомобиля, что непременно заставит водителя волноваться. Чего не скажешь о парковке автомобиля, здесь все наоборот, хочется не крутить руль туда-сюда на большие углы.
Тут на помощь устанавливается рейка с переменным профилем: в нулевой зоне зубья треугольные, а ближе к краям — трапецеидальной формы. Шестерня входит с ними в зацепление с разным плечом, что помогает изменить передаточное отношение.
Нормативные требования к рулевому управлению
Требования к элементам рулевого управления транспортных средств регламентируются Правилами ЕЭК ООН № 79.
Суммарный люфт в рулевом управлении в регламентированных условиях испытаний не должен превышать предельных значений, установленных изготовителем в эксплуатационной документации, а при отсутствии таких данных он не должен превышать 10° для легковых автомобилей и созданных на их базе агрегатов грузовых автомобилей и автобусов; 20° для автобусов; 25° для грузовых автомобилей.
Суммарный люфт в рулевом управлении — это угол поворота рулевого колеса от положения, соответствующего началу поворота управляемых колес в одну сторону, до положения, соответствующего началу их поворота в сторону, противоположную положению, примерно соответствующему прямолинейному движению транспортного средства.
Начало поворота управляемого колеса — это угол поворота управляемого колеса на 0,06 ± 0,01°, измеряемый от положения прямолинейного движения.
При проверке суммарного люфта необходимо выдерживать следующие условия испытаний:
- шины управляемых колес должны быть чистыми и сухими;
- управляемые колеса должны находиться в нейтральном положении на сухой ровной горизонтальной асфальтоили цементнобетонной поверхности;
- испытания автомобилей, оборудованных усилителем рулевого привода, проводятся при работающем двигателе.
Значение суммарного люфта в рулевом управлении определяют по углу поворота рулевого колеса между двумя зафиксированными положениями в результате двух или более измерений.
Натяжение ремня привода насоса усилителя рулевого управления и уровень рабочей жидкости в бачке должны соответствовать требованиям, установленным изготовителем ТС в эксплуатационной документации.
При органолептической проверке рулевого управления проверяется выполнение следующих нормативных требований:
- вращение рулевого колеса должно происходить без рывков и заеданий во всем диапазоне угла его поворота, неработоспособность усилителя рулевого управления (при его наличии на ТС) не допускается;
- самопроизвольный поворот рулевого колеса от нейтрального положения при неподвижном состоянии ТС с усилителем рулевого управления и работающем двигателе не допускается;
- максимальный поворот рулевого колеса должен ограничиваться только устройствами, предусмотренными конструкцией ТС;
- не предусмотренные конструкцией перемещения деталей и узлов рулевого управления относительно друг друга или опорной поверхности не допускаются;
- резьбовые соединения должны быть затянуты и зафиксированы способом, предусмотренным изготовителем ТС;
- применение в рулевом механизме и рулевом приводе деталей со следами остаточной деформации, трещинами и другими дефектами не допускается.
Повреждение и отсутствие деталей крепления рулевой колонки и картера рулевого механизма, а также не предусмотренное изготовителем ТС в эксплуатационной документации повышение подвижности деталей рулевого привода относительно друг друга или кузова (рамы) не допускаются.
Не допускается подвижность рулевой колонки в плоскостях, проходящих через ее ось. Рулевая колонка должна надежно соединяться с сопрягаемыми деталями и не иметь повреждений. Устройство фиксации положения рулевой колонки с регулируемым положением рулевого колеса, а также устройство, предотвращающее несанкционированное использование ТС, должны быть в рабочем состоянии.







Возможные неисправности
Значительных поломок у этого механизма не бывает, если не учитывать последствия после дорожно-транспортного происшествия. Как правило, у рулевой колонки изнашиваются подшипники, сальники, втулки, крепежные элементы кронштейна, карданные шарниры и шлицевые соединения. В некоторых случаях расшатывается защитный кожух. Заметить поломку РК достаточно просто. Она начинает хрустеть при поворотах, стучать, вибрировать, появляются люфт и скрип.

Ремонт рулевой колонки возможен в следующих случаях:
- износился кардан. В этом случае меняется вся система. Если автомобилист делает ремонт своими руками ему параллельно необходимо выяснить, что стало причиной поломки и устранить ее;
- износилась резьба крепления рулевого колеса. Причиной этому чаще всего служат агрессивный стиль вождения и влага. Сама резьба не восстанавливается, вал меняется полностью;
- износились подшипники. В этом случае они разбираются, старый выбивается, а новый запрессовывается. Это вполне можно сделать собственноручно;
- появилась коррозия на шлицевом соединении. Это происходит из-за влаги, которая скапливается под водительским ковриком. Небольшое количество ржавчины можно сошлифовать, в противном случае меняется весь узел.

Отметим, что рулевая колонка не только один из самых важных, но и один из самых крепких механизмов транспортного средства. Она может прослужить долгие годы при условии постоянного, качественного сервисного обслуживания. При этом большую часть работ можно сделать самостоятельно.
Зазоры и трение в рулевых механизмах
Все редукторы в разной степени нуждаются в периодических регулировках. За счёт износа изменяются зазоры в зубчатых соединениях, у руля появляется люфт, в пределах которого автомобиль неуправляем.
Червячные передачи регулируются перемещением зубчатого сектора в перпендикулярном входному валу направлении. Сохранность зазора при всех углах поворота руля трудно обеспечить, поскольку износ идёт разными темпами в часто используемом направлении движения прямо и более редко – в поворотах на различные углы. Эта общая проблема во всех механизмах, рейки тоже изнашиваются неравномерно. При сильном износе приходится заменять детали, иначе при вращении руля зазор будет переходить в натяг с повышенным трением, что не менее опасно.