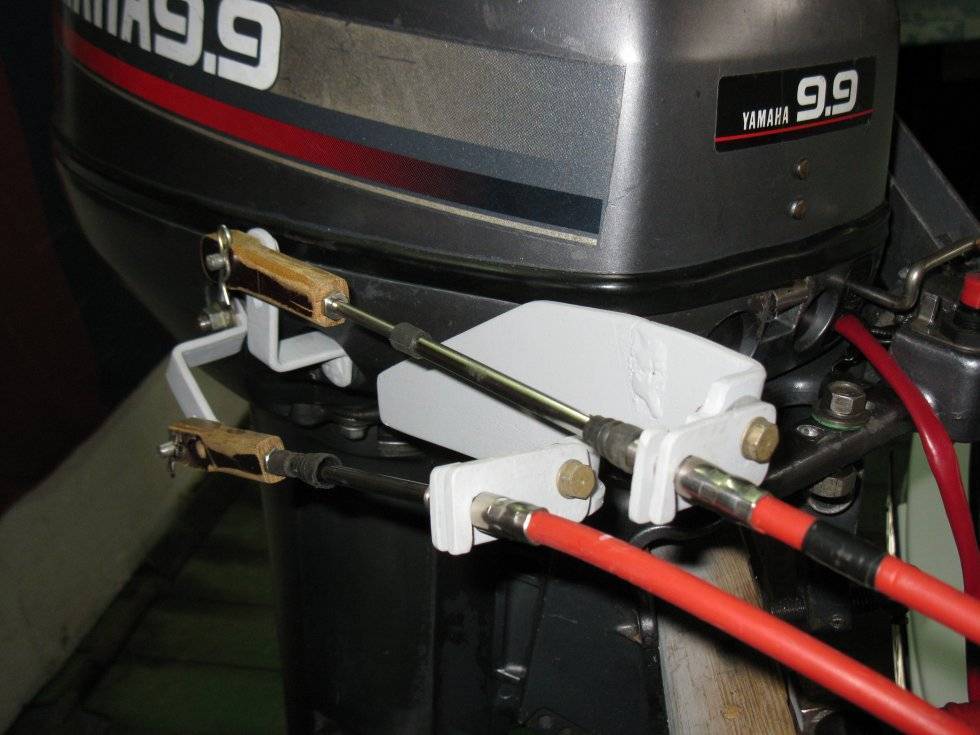
1.Подготовка румпельного лодочного мотора к подключению рулевого управления.
Если мотор румпельный, то для подключения к нему дистанционного рулевого управления необходимо его переоборудовать. Большинство производителей моторов предлагают готовые комплекты для переделки ПЛМ под рулевое ДУ. Нередко вместо готового комплекта производитель предоставляет владельцу мотора самостоятельно определить потребность в компелектующих. В этом случае нам необходимо установить на подвесной лодочный мотор крепежную пластину, за которую будет цепляться рулевая тяга, которую необходимо приобрести. Далее нужно убедиться в том, что на моторе есть место крепления рубашки троса. Как правило, лодочные моторы оборудованы специальной трубой, находящейся в районе струбцин крепления мотора к транцу. Если таковой трубы на моторе нет, то необходима транцевая опора рулевого троса (она бывает в простом исполнении или в комплекте с транцевой накладкой).
Комплект для подключения рулевого ДУ:
— крепежная пластина в количестве 1 шт. (если нет специального отверстия на моторе)
— рулевая тяга в количестве 1 шт.
— рулевая тяга для двух моторов в количестве 1 шт. (если планируется подключение двух ПЛМ или дополнительного подвесника)
— транцевая опора рулевого троса в количестве 1 шт. (если нет специальной трубы для подключения троса)
Итак, со стороны мотора всё готово. Что же осталось сделать?
Самодельное дистанционное управление лодочным мотором
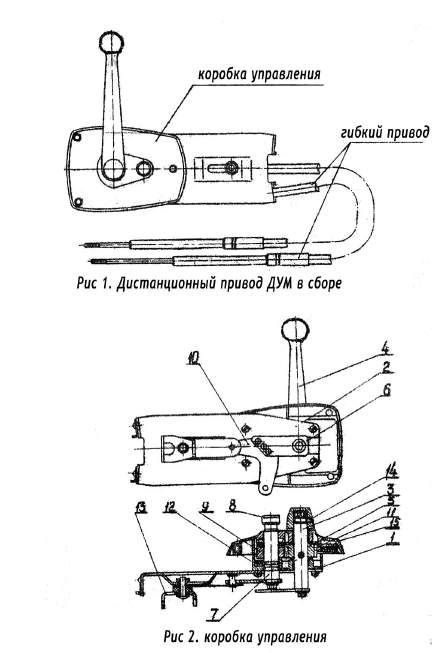
Простой однорукояточный привод дистанционного управления
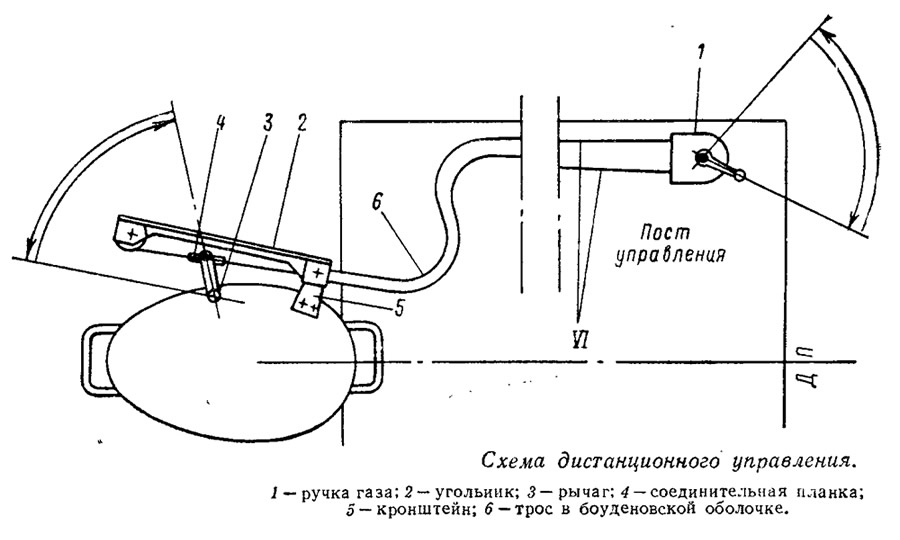
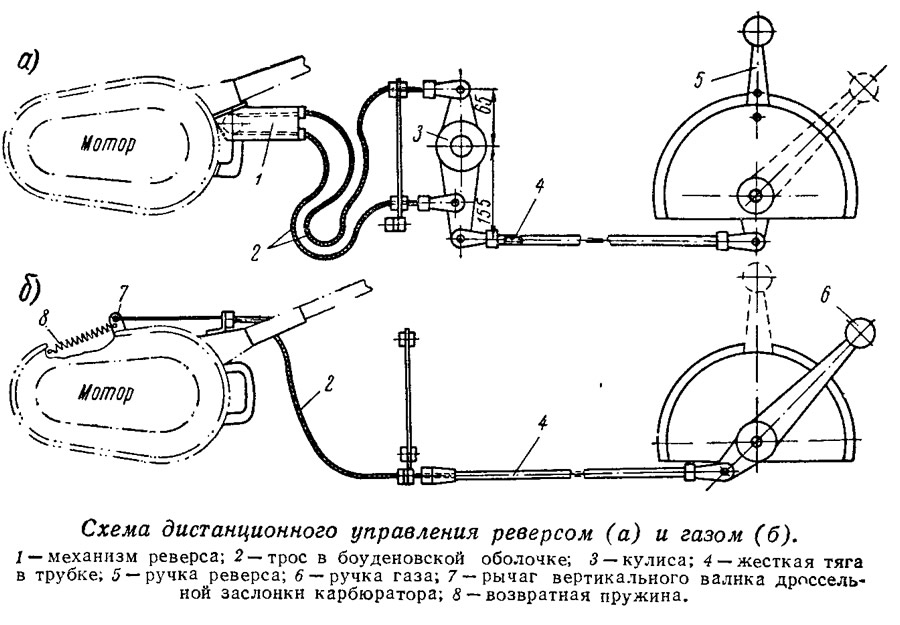
Системы дистанционного управления лодочными моторами обычно довольно сложны конструктивно и потому изготовление их отнимает много времени. Управление производится, как правило, двумя рукоятками («газ» и «реверс»), что затрудняет управление лодкой, особенно при буксировке лыжника. Варианты с однорукояточным приводом, описанные в статьях Л. П. Зимакова в № 15 и 33 сборника «Катера и яхты», предусматривают необходимость сложных переделок в самом моторе.
При разработке предлагаемого варианта самодельного дистанционного управления лодочным мотором я задался целью, с одной стороны, максимально упростить процесс управления лодкой, а с другой — свести к минимуму необходимые доработки в моторе и обеспечить возможность изготовления системы в домашних условиях (одновременно с необходимыми блокировками, гарантирующими, например, невозможность полного открытия дросселя при выключенном реверсе).
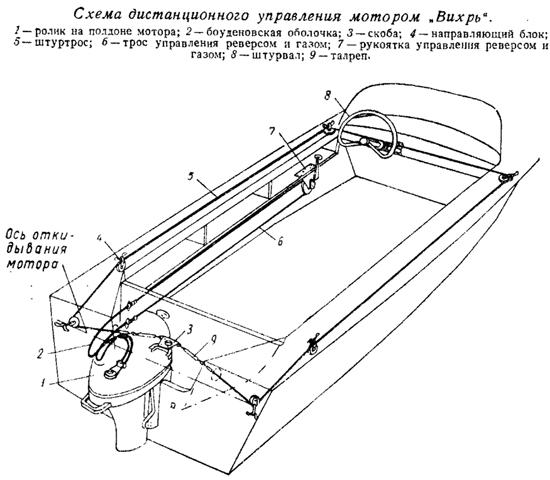
Система дистанционного управления выполнена однотросовой, поэтому пришлось установить возвратные пружины для обеспечения «сброса» газа и выключения муфты редуктора. Наличие пружин значительно упрощает привод, но, безусловно, снижает его надежность, в связи с чем необходимо вынести кнопку «стоп» на пульт управления.
Зная по опыту долголетней эксплуатации «Вихря» на сравнительно легкой (120 кг) лодке, что включение заднего хода требуется чрезвычайно редко, я отказался от выноса включения реверса на пульт управления. Это также упростило конструкцию привода. При необходимости задний ход включается непосредственно рукояткой реверса на моторе.
Таким образом, привод обеспечивает включение переднего хода и нейтрали и управление газом, причем все эти операции производятся одной рукояткой.
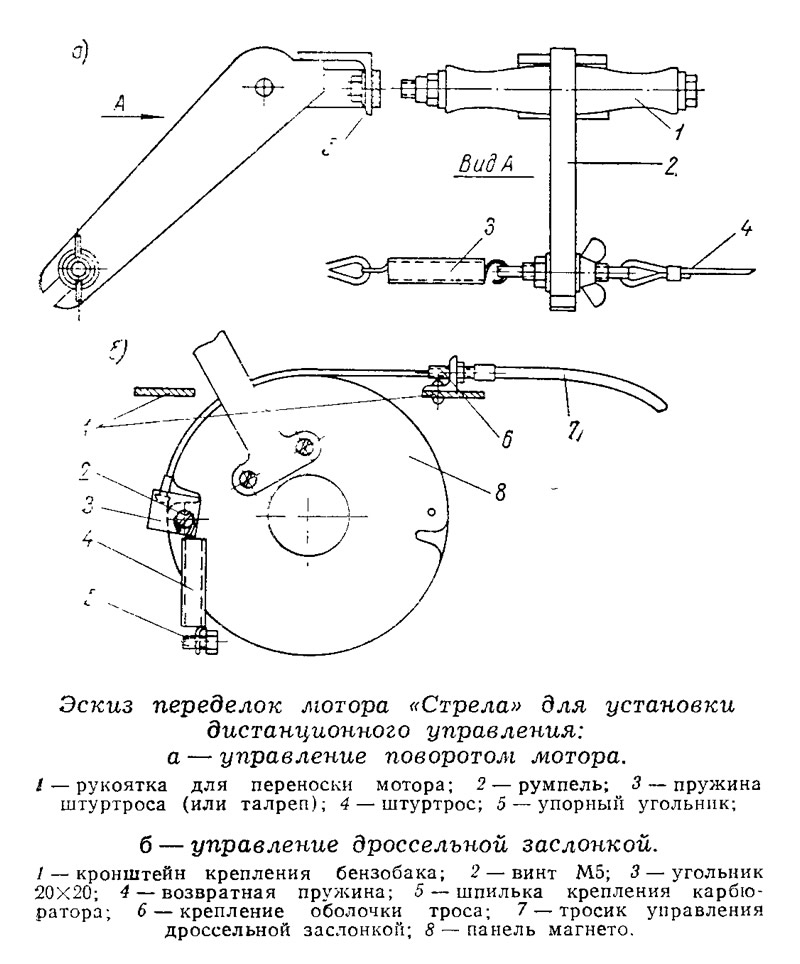
Доработка мотора (в данном случае «Вихря») заключается в следующем.
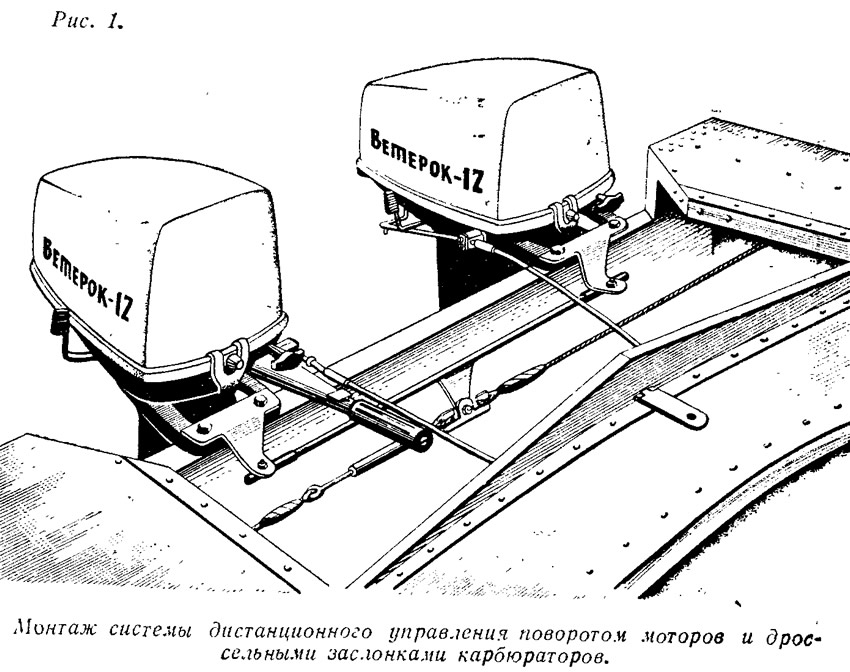
Для управления дроссельной заслонкой карбюратора на вертикальном валике привода необходимо установить рычаг 60 мм с зажимом для тросика на конце.
Оболочка троса закрепляется стальным или латунным хомутиком к приливу поддона мотора в существующее отверстие.
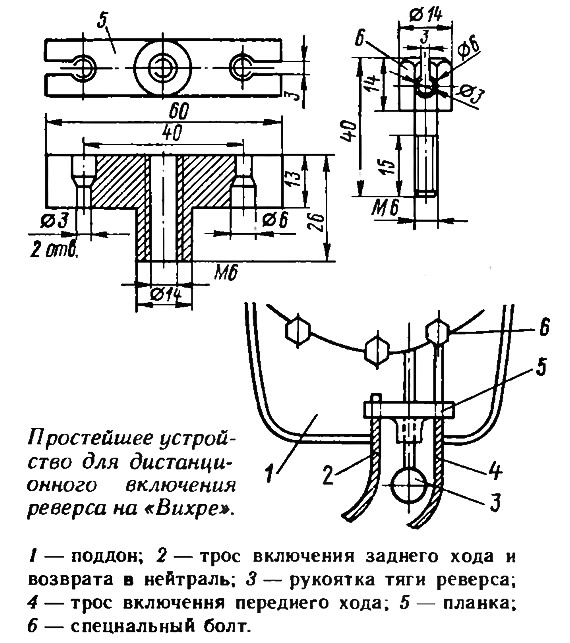
На поддон устанавливается упор из дюралюминия или стали толщиной 3-4 мм так, чтобы ползун переключения реверса упирался в него передней частью в положении «нейтраль». Этот упор нужно сделать откидывающимся для возможности включения заднего хода.
В отверстии для крепления горизонтальной тяги реверса закрепляется конец пружины; второй ее конец крепится в отверстии передней части поддона. Пружина должна прижимать ползун к упору с усилием 3-5 кг и развивать усилие 10 кг при полностью включенном переднем ходе (крайнее заднее положение ползуна).
Боуденовская оболочка крепится в поддоне. Трос протягивается через блочок, расположенный на задней части поддона, и крепится к ползуну реверса с помощью вилки из листовой стали и короткого пальца, входящего в горизонтальную часть прорези ползуна.
Подготовка моторов других марок совершенно аналогична, кроме переключения реверса. На «Нептуне», «Москве», «Ветерке» и т. п. передний ход включается движением рычага вперед и поэтому ролика на тросе, изменяющего направление движения, не требуется.
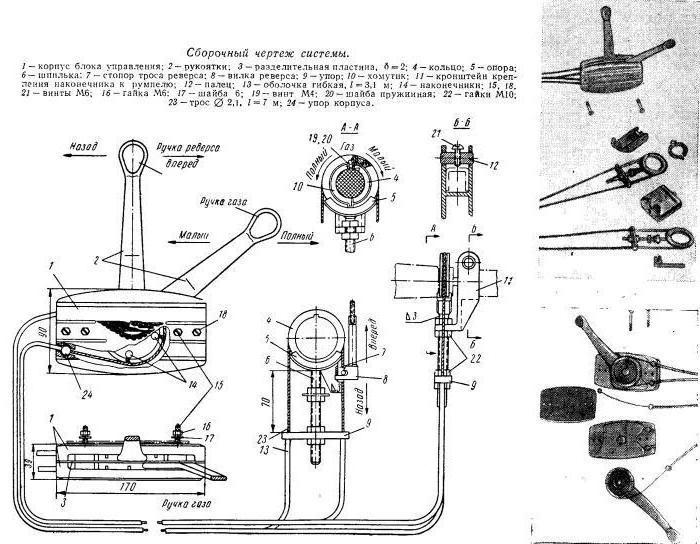
Собственно привод дистанционного управления чрезвычайно прост по конструкции и в изготовлении.
Механическая система ДУ
В ДУ входит рулевая система для контроля поворотов мотора и система управления газом. Рулевые делятся на механические и гидравлические. Стоимость первой системы ниже и легче процесс установки.
Но при этом их нельзя применять на движках большой мощности. Также рулевой трос чутко реагирует на перегибы и не может долго использоваться. В механические устройства входит:
| № | Полезная информация |
|---|---|
| 1 | редуктор |
| 2 | трос |
| 3 | рычаг |
| 4 | колесо |
Далее следует разобраться, какое назначение имеет каждая составляющая системы.
- Рулевые редукторы делят на группы по мощности движка: до 55 «лошадок» и более. Последние годятся даже на моторы до двухсот лошадиных сил. Правда, в таком случае уместнее будет поставить гидравлическую систему.
- Трос подбирается согласно модели редуктора и параметров лодки. Так, до 55 лошадиных сил подойдет трос марки М58, а выше – М66. Чтобы правильно подобрать его, нужно померить длину от центра редуктора до борта катера, потом до транца (место крепления подвесного мотора) и учесть половину ширины транца. Далее все три цифры складываются и получается результат в метрах. Цифру делят на 0,3 и остается длина в футах.
- Рычаги необходимы для того, чтобы приспособить механическую систему практически к любому движку. Также благодаря им становится возможным управление лодочным мотором в системе, состоящей из нескольких двигателей, но с одним рулевым редуктором.
- Колесо представляет собой отверстие с пазом для сцепления с редуктором. С ними проблем не возникает, поскольку все колеса могут сосуществовать с разными редукторами. Нужно лишь выбрать комплектацию, потому что некоторые производители предлагают колеса без втулок.
Спасательные жилеты
Для организации безопасного плавания стоит позаботиться о наличии нужного количества спасательных жилетов. Совсем не помешает предварительно поинтересоваться у пассажиров, все ли умеют плавать, и в дальнейшем учитывать это при планировке маршрута.
На скорость и управление лодкой влияют скопления воды в льялах, поэтому сначала нужно полностью их выкачать. Перед запуском подвесного мотора следует поднять кожух, дабы избавиться от опасных паров топлива.
Также для безопасности следует прихватить подробную карту, если вы плохо знаете акваторию, по которой будет совершать плавание.
Отмели, различные препятствия, перепады глубины и прочее могут не просто спровоцировать неожиданные поломки и мелкие проблемы, но и вовсе стать угрозой для жизни.
Перед отплытием стоит продумать комплекс действий в случае выхода из строя мотора. Курс лучше прокладывать так, чтобы при поломке ветер подогнал судно к берегу, а не от него. Не будет лишним прихватить хороший якорь с определённой длиной каната.
3.Подобрать, купить и подключить рулевоге управление на лодку.
Обратите внимание! Перед покупкой рулевого троса ОБЯЗАТЕЛЬНО рассчитайте его длину, изучите классификацию рулевых тросов и проверьте совместимость троса с рулевым редуктором! Перед покупкой рулевого редуктора изучите их характеристики — под какой трос предназначен, количество оборотов для полной перекладки руля, длина вала, размеры. Полный состав комплекта рулевого управления на лодку или катер:
Полный состав комплекта рулевого управления на лодку или катер:
— рулевой трос в количестве 1 шт.
— рулевая тяга в количестве 1 шт.
— рулевая тяга для двух моторов в количестве 1 шт. (если планируется подключение двух ПЛМ или дополнительного подвесника)
— транцевая опора рулевого троса в количестве 1 шт. (если нет специальной трубы для подключения троса)
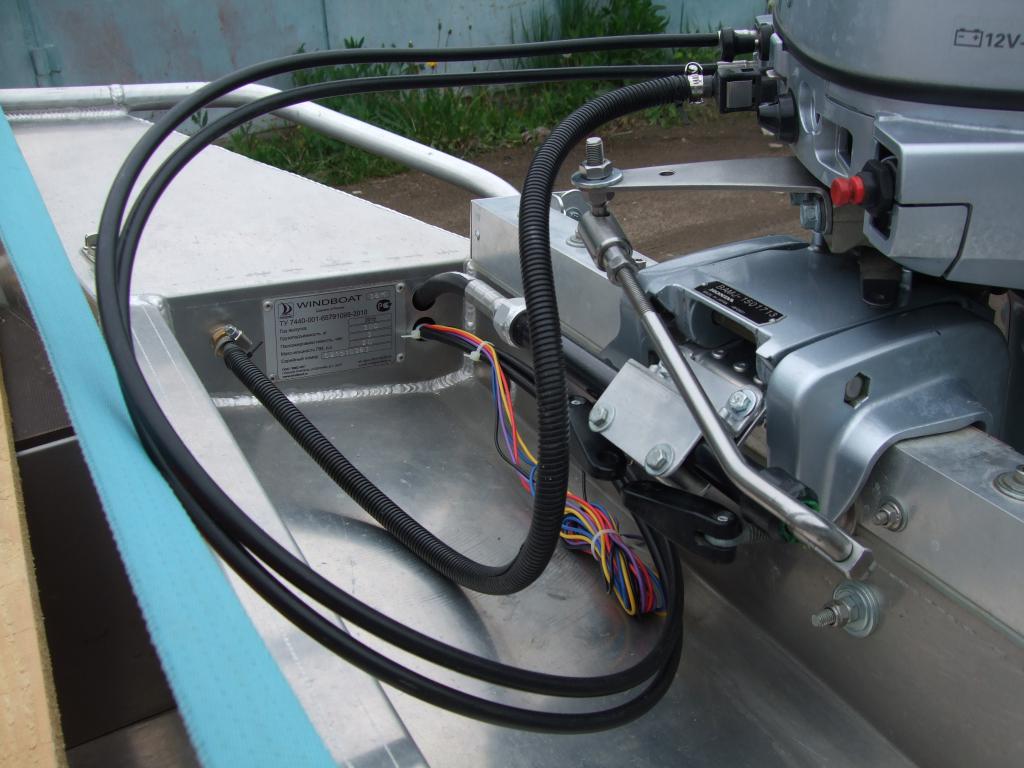
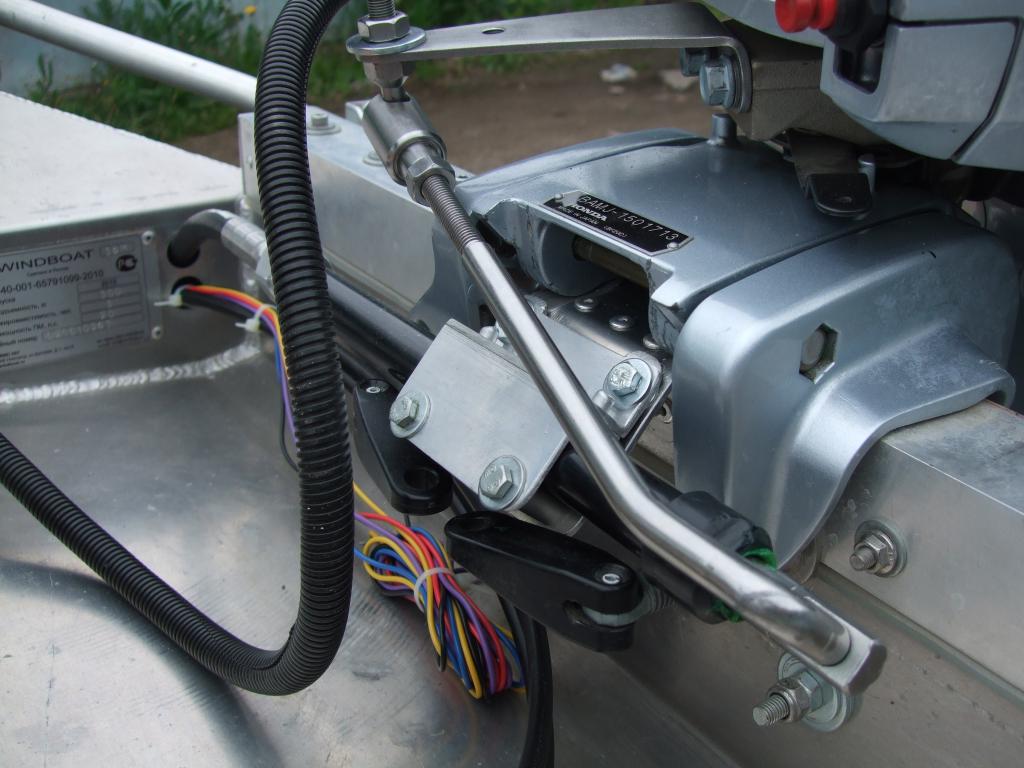
Последовательность сборки и подключения рулевого управления.
В сборке и подключении рулевого ДУ нет ничего сложного, с этим справится даже школьник: — заводим трос в рулевой редуктор (НЕ ЗАБЫВАЕМ ПРЕДВАРИТЕЛЬНО ЕГО СМАЗАТЬ!) — слегка накидываем рулевое колесо на вал редуктора и протаскиваем трос внутри редуктора поворотом руля (РУЛЬ НЕ ПРИКРУЧИВАЕМ!) — крепим рубашку троса за редуктор — устанавливаем специальную пластину из комплекта крепежа для рулевого редуктора на консоль — снимаем руль с рулевого редуктора, крепим редуктор к пластине и прокладываем трос в лодке — накинув руль на редуктор вращаем его и добиваемся того, чтобы шток рулевого троса вылез ровно наполовину своего хода (РУЛЬ НЕ ПРИКРУЧИВАЕМ!) — проверяем центровку руля (если руль по центру пропускаем следующий шаг)
Центровка руля . скоро будет руководство.



— заводим шток троса в трубу или транцевую опору и крепим рубашку гайкой — цепляемся за мотор (если применяется рулевая тяга, то регулируем ее длину не сдвигая шток рулевого троса с ранее установленного положения) — вращая руль влево-вправо проверям, что МОТОР ВРАЩАЕТСЯ В НУЖНУЮ СТОРОНУ! Если при повороте руля влево мотор поворачивается наоборот вправо, значит рулевой трос заведён в редуктор неправильно! Вытаскиваем трос из рулевого редуктора и заводим его в соседнее отверстие. После чего опять проверяем правильность вращения мотора. — если всё сделано правильно, то снимаем руль с редуктора, крепим к консоли декоративную накладку, надев ее на вал редуктора — одеваем руль на вал редуктора и ТОЛЬКО В САМОМ КОНЦЕ НАДЕЖНО ПРИКРУЧИВАЕМ РУЛЬ ГАЙКОЙ!
Рулевое управление подобрано, установлено и подключено! Осталось занять удобные места и наслаждаться проделанной работой!
Примеры выполненных работ.
По производителю
Сегодня на рынке представлено огромное количество производителей ПЛМ, и поэтому, сделать выбор в пользу конкретной модели, зачастую очень сложно.
Существует несколько стран производителей — это Япония, США, Китай, Россия. Давайте Россию брать не будем (если не хотим идти на веслах 20 км до стоянки машины, к тому же наши моторы найти в продаже новыми труднее всего), с подозрением относимся к Китаю, если конечно вам ненужен ПЛМ малой мощности (лошадки две) и выход на воду одному, два раза в навигацию. Остается Япония и США. Споры про то, что Suzuki — надежнее, Yamaha — тише, Honda — технологичнее, имеют место быть, но это скорее дело вкуса. Главное, чтобы ПЛМ выполнял функциональные задачи, и конечно вам нравился.
Обзор готовых решений
Как вариант часто применяется специальная машинка модели T100. Хороша совместимостью — ставится на ПЛМ всех известных брендов, мощность 5 л.с. или более. Для привода нужен стабильный постоянный источник тока, напряжение 12 В. Время, за которое поворот полностью поворачивается, примерно 4 сек. Просто собрать, разобрать его на лодочном транце. Управление выполняется с проводного пульта. Кабельная длина — три, шесть метров.
Если ваше ПЛМ импортное, мощность более 10 л.с., то подойдет электромашинка T4, подобные же характеристики, дополнительные способы повысить эффективность.
Характеристики лодочных электрических моторов

- Тяга развиваемая электрическим лодочным мотором является его главной рабочей характеристикой. У большинства лодочных электромоторов развиваемая ими тяга указана в названии мотора. Тяга измеряется в английских фунтах (lbs), которые можно легко перевести в килограммы умножив тягу в фунтах на 0,4536. Для лодки весом 0,5 тонны требуется тяговое усилие до 33 lbs, лодки весом в 1 тонну – до 45 lbs. Мощность лодочного электромотора измеряется в лошадиных силах или в ваттах. Тяга развиваемая мотором напрямую зависит от его мощности. Мощность большинства лодочных электрических моторов составляет от 0,3 до 1 лошадиной силы.
- Максимальный ток потребления электродвигателя при максимуме нагрузки влияет на емкость аккумуляторной батареи и время ее работы при максимальной нагрузке до полного разряда.
- Рабочее напряжение лодочного электродвигателя может быть 12 или 24 вольта, у абсолютного большинства моторов оно составляет 12 вольт.
- Способ регулировки скорости у лодочного электромотора может быть либо с помощью переключения передач (обычно пять скоростей для движения вперед и две-три скорости для движения назад) или плавное изменение скорости с помощью цифрового вариатора.
- Лодочные моторы различаются по месту установки на устанавливаемые на носу лодки и устанавливаемые на корме. Моторы устанавливаемые на корме лодки могут закрепляться на транце резьбовыми зажимами или устанавливаться на кавитационной плите главного мотора и управляться с помощью пульта дистанционного управления. Моторы устанавливаемые на носу лодки закрепляются на специальной монтажной платформе. Наиболее распространены моторы с румпельным управлением закрепляемые на транце.
- Вес лодочного электромотора зависимости от особенностей его конструкции и величины развиваемой им тяги и чаще всего находится в пределах от 3 до 15 килограммов.
- Высота дейдвуда (штанги) лодочного мотора подбирается в зависимости от высота транца лодки или катера на который этот мотор будет установлен. Большинство электрических лодочных моторов имеют высоту дейдвуда (штанги) от 600 мм до 1350 мм.
Дистанционное управление для лодок в Балашихе
Пульт для дистанционного управления приборами AC220V PB.
Трос дистанционного управления 14 футов (4,27 м) для ПЛ.
Пульт дистанционного управления
Дистанционное управление левый борт, тянет газ, 5 м. (а.
Пульт дистанционного управления газом и реверсом, серий.
Пульт дистанционного управления Minn Kota DH Remote Swi.
Дистанционное управление с гидроподъемом, тянет газ, 5м.
Цифровая Система Дистанционного Управления РадиоБИТ РБ-.
Трос дистанционного управления 10 футов (3,05 м) для ПЛ.
Пульт управления транцевой плитой
Привод дистанционного управления газом и реверсом «700.
Пульт дистанционного управления Форсаж ПДУ-03
Дистанционное управление без гидроподъема, толкает газ.
Трос дистанционного управления 2 фута (0,61 м) 33002
Панель дистанционного управления Max Power Touch Panel.
Панель дистанционного управления Wallas 1302 для отопит.
Блок дистанционного управления лебедками autoTRAC WIRO1.
Дейдвуд-приставка для мотора лодочного CARVER 01.001.00.
Дистанционное управление Yamaha 703 (последнее поколени.
Пульт дистанционного управления автопилотом Lowrance WR.
Дистанционное управление универсальное, черное
Кронштейн рукоятки управления для лодочного мотора Carv.
Привод дистанционного управления газом и реверсом «CH17.
Привод дистанционного управления газом и реверсом «CH17.
Беспроводное пятикнопочное дистанционное устройство Lew.
Трос дистанционного управления 12 футов (3,66 м) E.Chan.







Дистанционное управление однорычажное
Беспроводной контроллер дистанционного управления перед.
Трос дистанционного управления 12 футов (3,66 м) для ПЛ.
Контроллер «газ-реверс» SeaStar с возможность.
Комплект дистанционного управления электрической якорно.
Дистанционное управление Suzuki DF70A-140A/DF200A, в ко.
Комплект подключения дистанционного управления Suzuki D.
Пульт дистанционного управления Minn Kota
Трос дистанционного управления 10 футов (3,05 м) E.Chan.
Дистанционное управление Canon RC-6 Remote Controller б.
Трос дистанционного управления 21 фут (6,40 м) HL21ft-0.
Привод дистанционного управления газом и реверсом «CH17.
Установочный комплект дистанционного управления для мот.
Трос дистанционного управления 11 футов (3,35 м) E.Chan.
Трос дистанционного управления для моторов Mercury
Дистанционное управление постовое для управления двухмо.
Трос дистанционного управления 9 футов (2,74 м) 33009
Дистанционное управление правый борт, тянет газ, 5м. (а.
Трос дистанционного управления 14 футов (4,27 м) E.Chan.
Дистанционное управление универсальное, черное
Дистанционное управление универсальное, белое
Система дистанционного управления Wallas 4430
Трос дистанционного управления 11 футов (3,35 м) для ПЛ.
Привод дистанционного управления газом и реверсом «700.
Рукоятка управления в сборе для лодочного мотора Carver.
Рукоятка управления в сборе для лодочного мотора Carver.
Рулевой редуктор Light Duty
Пульт дистанционного управления с антенной для лодки DH.
Дистанционное управление двухрычажное (газ/реверс) 1240.
Трос дистанционного управления 22 фута (6,71 м) 33022
Пульт дистанционного управления оранжевый 27MHz
Привод дистанционного управления газом и реверсом «700S.
Управление дистанционное реверсом и дроссельной заслонк.
Комплект переходников ДУ для подвесных моторов Mercury.
Дистанционное управление однорычажное, Pretech
Трос дистанционного управления 13 футов (3,96 м) GENII.
Трос дистанционного управления 12 футов (3,66 м) GENII.
Управление дистанционное реверсом и дроссельной заслонк.
Выключатель батареи с дистанционным управлением
Worklight Dali Sensor, Дистанционное Управление Для Пол.
Комплект подключения дистанционного управления Suzuki D.
Как работает система Minn Kota i-Pilot
i-Pilot использует сигнал со спутника GPS и данные цифрового компаса для того, чтобы определить координаты лодки и положение головки электромотора. После этого он расставляет воображаемые точки от вашего текущего места по направлению к цели маршрута, запоминает их координаты и использует для автоматического движения в выбранном направлении.









Маршруты в свою очередь состоят из множества точек, которые i-Pilot запоминает во время записи движения лодки. Расстояние между этим точками зависит от силы сигнала GPS и от скор ости лодки. Чем сильнее сигнал, тем меньшее расстояние будет между точками и точнее можно будет воспроизвести путь потом.
i-Pilot может записать шесть индивидуальных точек и шесть маршрутов. Запись производится в разные виды памяти, поэтому ситуация, когда места лова будут перезаписаны маршрутами движения невозможна.
Как работает Spot Lock
После того как вы нажали клавишу Spot Lock i-Pilot использует ваши текущие координаты, для расчета смещения лодки. Эти координаты автоматически запоминаются и хранятся устройством. Вокруг выбранной точки рисуется воображаемая окружность, пересечение которой будет служить сигналом для корректировки положения. Если лодка находится внутри окружности — мотор выключен, винт не вращается. Если граница пересекается — отдается команда электромотору, и лодка возвращается в первоначальную позицию.
Как работает круиз контроль
i-Pilot автоматически регулирует скорость вращения винта электромотора для того, чтобы поддерживать постоянную GPS скорость
Как работает автопилот
Существует два вида автопилота. Обычный автопилот использует встроенный компас для поддержания курса. Вы указываете направление, повернув в нужную сторону головку электромотора, автопилот блокирует ее произвольное вращение и ориентируясь по компасу ведет лодку вперед.
Если после этого вы вручную повернули головку, система воспринимает команду к смене курса и принимая в расчет показания компаса, фиксирует электромотор уже в новом направлении.
Этот метод управления не учитывает внешние силы, такие ветер или течение из-за которых может возникнуть боковой дрейф.
Продвинутый автопилот тоже использует показания компаса, но корректирует их исходя из данных, получаемых со спутников GPS. Знание точных GPS координат позволяет вносить поправки на боковой ветер или течение.
Такая система точно удерживает лодку на прямой. Когда продвинутый автопилот включен, он генерирует набор точек в направлении головки электромотора, проводит по ним линию и затем просто перемещает между этими точками лодку. Если вы указываете новое направление, устройство создает новый набор GPS точек.
Когда и какой автопилот использовать? Оба вида имеют свои преимущества. Выбирать следует в зависимости от способа лова и необходимого поведения приманки.
Продвинутый автопилот в большинстве случаев будет лучше удерживать лодку на прямой линии. Однако если вы двигаетесь при очень сильном ветре или течении, электромотору может не хватить тяги для плавного управления. В таких условиях правильнее будет использовать обычный автопилот и тем самым дать лодке возможность немного отклониться от курса.
Оба автопилота служат мощным инструментом для задания точного поведения приманки. Наилучший способ понять их работу — попробовать обе системы в действии на воде и затем принимать решение исходя из конкретных условий лова.
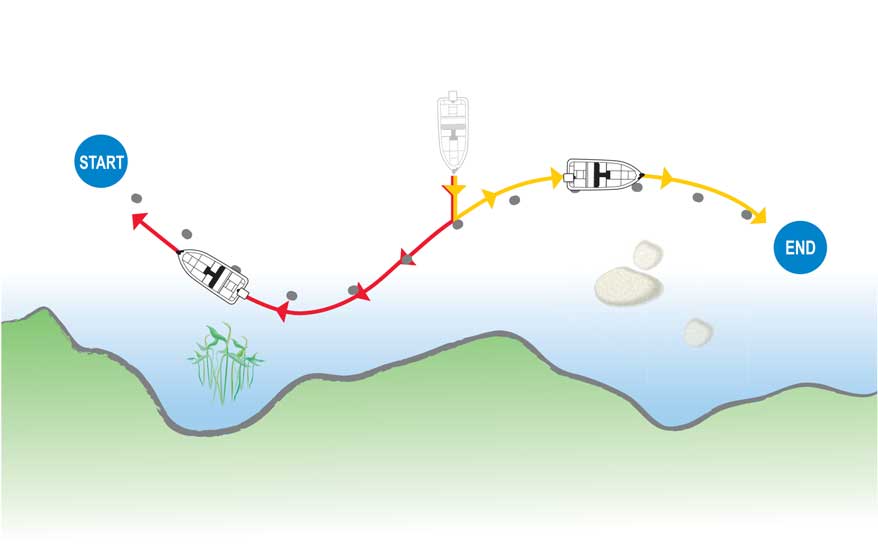
Как работает запись маршрута
Как уже упоминалось, i-Pilot представляет себе маршрут движения лодки в качестве набора точек. Первая записанная точка считается началом маршрута, последняя его окончанием.
Предположим вы хотите еще раз пройти по уже записанному ранее пути. Как это сделать? Нажимаете на клавишу Track to Start или Track to End. Система определяет местонахождение лодки, находит ближайшую к вам точку выбранного маршрута и направляет судно к ней. После того как это место достигнуто, лодка двигается к следующей точке, затем к следующей пока не дойдет до начала или конца пути.
Во время движения i-Pilot автоматически держит лодку на курсе, у вас остается возможность управлять скоростью. Ее можно регулировать вручную или установить с помощью круиз контроля. При этом скорость должна быть достаточно высока для того, чтобы лодка оставалась на курсе несмотря на ветер или течение.
Советы начинающим лодочникам по управлению моторной лодкой
Выходя в лодке на воду (не имеет значения есть у тебя права или ты без прав), следует учитывать ряд моментов, влияющих на качество управления маломерным судном.
1. Подготовьтесь теоретически. Ответ на вопрос о том, как управлять моторной лодкой, всегда заключается в понимании процессов взаимодействия между твердым телом и жидкой средой. Имея представление об основных принципах гидродинамики, можно эффективно контролировать скорость и направление движения, а также избежать поломок двигателя.
2. Подготовьтесь к неожиданным ситуациям. Перед выходом на воду в моторной лодке, обязательно запаситесь индивидуальными средствами спасения, а также веслом – оно пригодится в случае выхода из строя двигателя. Проверьте количество топлива, желательно заранее распределить его количество на 3 равные части – для плавания, возвращения и резерва.
3. Установите и настройте мотор. Двигатель лодки необходимо размещать в кормовой части на транце
Важно заранее отрегулировать глубину погружения винта – если он будет захватывать воздух с поверхности, возникнет кавитация, разрушительно действующая на лопасти
4. Контролируйте мощность мотора. Этот параметр двигателя определяет частоту вращения винта и, следовательно, скорость движения лодки. В большинстве подвесных моторов управление мощностью осуществляется с помощью вращения рукоятки по или против часовой стрелки.
5. Контролируйте направление движения. Управление небольшими моторными лодками осуществляется поворотом мотора вокруг вертикальной оси. Как правило, это осуществляется с помощью румпеля, но на тяжелых и мощных моделях может быть установлен рулевой редуктор.
6. Учитывайте условия среды. Сила и направление ветра и водных течений, глубина, наличие препятствий и многие другие факторы значительно влияют на характер движения лодки. Следует внимательно изучить особенности водоема перед выходом на воду, узнать погодные условия на момент плавания.
Какие еще бывают нюансы в работе лодочных моторов?
Существуют боле мелкие и тонкие моменты в работе лодочного мотора, которые стоит также знать. Ведь порой от несерьезного нюанса может зависеть работа мотора в целом. В целом нужно изучать свой агрегат, какой бы бренд вы не приобрели для себя. Каждый мотор будет обладать какими-то уникальными чертами, которые нужно учитывать:
| № | Полезная информация |
| 1 | в любом малогабаритном транспорте крайне важна система охлаждения, которая осуществляет ваш лодочный мотор от ненужного перегрева, который может просто-напросто погубить вашу лодку. Такая система осуществляет отвод тепла от самого цилиндра и его головки. В системе зажигания всегда содержится какая-то часть воды. Ни в коем случае не начинайте эксплуатацию своего лодочного мотора в том случае, если в этой части мотора нет жидкости. Таким образом, лодочный мотор может очень быстро перегреться, что приведет к очень быстрому износу многих деталей двигателя |
| 2 | говоря про установку лодочного мотора на маломерное судно, нужно упомянуть, что к конкретному виду мотора всегда подходит только конкретный транец с определенными показателями. Их непременно стоит узнавать из инструкции вашего подвесного или стационарного мотора на лодку. Для того, чтобы установить мотор чаще всего стоит расположить его на транце струбцинами на всю глубину из пазов и завернуть все ваши винты. Если же вдруг ваш транец окажется чересчур великим для вашей малогабаритной лодки, то нужно будет прикреплять мотор к специальной дополнительной рамке |
важно учитывать такую вещь, как остановка вашего лодочного мотора. Чтобы остановить лодку нужно уменьшить обороты вашего двигателя до минимальных показателей
После этого уже стоит выключать зажигание двигателя, нажав при этом кнопку остановки двигателя. В данном случае в карбюраторе и трубке лодочного двигателя остается часть топлива. Ее нужно будет вылить при снятии вашего подвесного или стационарного лодочного мотора непосредственно с лодки. Если же вы хотите заглушить ваш лодочный мотор на длительный срок, тогда будет необходимо остановить его выработкой топлива в трубке и карбюраторе вашей лодки. В этом случае перекройте ваш топливный кран. Также после выработки вашего топлива карбюратор может заглохнуть – будьте готовы к этому;
если говорить про обкатку лодочного мотора, учтите, что его нельзя пускать в работу с абсолютно полной нагрузкой. Такая обкатка скорее необходима для так называемой приработки деталей. Эта процедура, как правило, проходит достаточно долго – около 10-12 часов. Именно это количество времени по расчетам равно 6-8 бакам топлива того или иного лодочного водного транспорта. Во время этой процедуры необходимо, чтобы ваш двигатель работал на достаточно низких оборотах.
Рекомендуем прочитать: Основные характеристики лодочных моторов Honda
После выработки первых 2-3 баков вашего горючего, нужно проверить и очистить электроды лодочной свечи, также затяжку всех винтов и гаек. В том числе проверьте гайку маховика и при необходимости подтянуть их. После вашей обкатки подвесного лодочного мотора необходимо будет в обязательном порядке заменить масло в вашем редукторе.
UI клиента
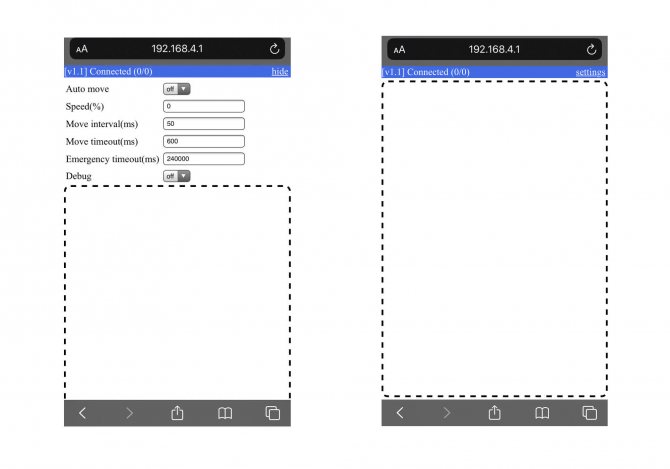
При свёрнутом меню настроек для управления доступна почти вся область экрана Настройки:
- Auto move (on/off) — во включённом состоянии скорость не регулируется и задаётся в параметре Speed.
- Speed (%) — используется в связке с параметром Auto move.
- Move interval (ms) — интервал, через который будут отправляться команды с клиента. Мы не можем отправлять команды очень редко: тогда управление лодки будет происходить с большой задержкой. Очень маленькую задержку мы ставить тоже не можем, потому что контроллер не будет успевать обрабатывать запросы. По умолчанию — 50 миллисекунд.
- Move timeout (ms) — интервал, через который лодка поймёт, что новые команды ей больше не приходят. Некоторые команды доходят до контроллера с задержкой, то есть между командами есть паузы больше, чем в параметре Move interval. Чтобы движение при этом оставалось плавным, был введён параметр Move timeout. Лодка будет выполнять последнюю команду Move timeout миллисекунд. По умолчанию — 600 миллисекунд.
- Emergency timeout (ms) — если за таймаут не приходят команды, то лодка начинает неспешно двигаться вперёд. По умолчанию — 4 минуты.
- Debug (on/off) — включение дебага, при котором отображаются подробные ошибки подключения и все команды.
Все таймауты отправляются серверу в каждой команде, поэтому настроить их можно в любой момент.

Управление направлением
Управление скоростью
Какой консоли стоит отдать предпочтение?
Рулевая консоль предназначается для изменения направления движения плавсредства. Кроме этого, здесь могут располагаться приборы различного назначения, в том числе и приборы контроля работы мотора.










Все элементы крепятся на специальном шасси, к которому подведены все детали управления мотором. Здесь так же можно установить тахометр, вольтметр и триммер, контролирующий угол наклона подвесного мотора. Мало того, многие владельцы подобных конструкций устанавливают на них навигаторы и эхолоты. Можно встретить различные конструкции дистанционного управления в зависимости от конструкционных особенностей лодок ПВХ. Поскольку лодки отличаются габаритами, то и консоли имеют различные размеры.
Для выбора подходящего варианта нужно руководствоваться некоторыми рекомендациями:
Назначение маломерного судна:
- для рыбалки или охоты;
- для туризма.
Интенсивность эксплуатации и дальность передвижения.
Приобретая консоль, следует детально изучить ее технические характеристики. Например:
- в чем достоинство данной модели;
- ее материал изготовления;
- его габаритные размеры и технические возможности.
Обычная рулевая консоль
Обычное дистанционное управление для судов из ПВХ предусматривает такие устройства, как:
- рулевые тросики;
- удлинители румпеля;
- редуктор штурвала;
- реверсной машинки с газом.
Монтаж устройства дистанционного управления мотором осуществляют перед спуском моторной лодки на воду.
Как правило, в комплект дистанционного управления входит:
Подвесной мотор для лодки, способный управляться дистанционно.
Элементы управления работой двигателя, такие как:
- широкая или узкая рулевая консоль со всеми крепежными элементами;
- редуктор, подобранный под конкретный тип мотора и штурвала;
- штурвал;
- трос;
- тяга;
- элемент крепления тяги.
Как правило, основным устройством считается редуктор, который трансформирует вращательные движения штурвала в поступательные движения управляющего троса.
Существует 2 вида редукторов:
- для подвесных лодочных моторов, имеющих мощность до 55 л.с., с одинарной передачей;
- для двигателей мощнее 60-ти л.с., работающие по планетарному принципу.
Практически все конструкции имеют панель, изготовленную из водостойкой фанеры, пластика или из нержавейки. Гораздо реже можно встретить другие варианты исполнения.
Мини консоль для лодки ПВХ
Консоль не большого размера, в отличие от классической консоли, отлично подходит для установки на надувные лодки не больших габаритов.
К достоинствам мини конструкции следует отнести:
- Ее можно устанавливать на конструкции плавсредств любого размера.
- Не большой вес и легкость в монтаже.
- Крепится консоль к баллонам лодки посредством специальных переходников, которые имеются в комплекте мини консоли.
- Имеется возможность установки 2-3 дополнительных элементов, таких, как эхолот, тахометр и навигатор.
В мини конструкции используются стандартные редуктора:
- Редуктор G08, T67.
- Редуктор Т-71 FC, а также другие подобные редуктора.
Следует отметить, что выпускаются мини консоли и с левосторонним управлением.
Габариты мини консоли: длина – 750 мм, ширина – 920 мм и высота – 720 мм. Изготавливается устройство из белого или серого стеклопластика и имеет вес до 4-х килограммов. Стоит подобная конструкция от 7-ми до 12-ти тыс. рублей.
Рекомендуется устанавливать такой элемент, как рейлинг, который поможет уберечь конструкцию от поломки при наличии волнений на воде. Кроме этого, на этот элемент можно установить фары или другое оборудование, необходимое при эксплуатации.